跑通这里给的 example,注意一下 clone 需要 git-lfs 不然大文件无法下载,不知道 macos 和 window 是否有不同。 seeed也有不错的文档
安装环境
安装之后记住默认安装路径,在默认 activate 上面选择 否 (不然每一次都会开启,会拖慢打开 Terminal 的速度)
conda create -y -n lerobot python=3.10
之后需要 conda init 来起始。把之前的 conda init 的代码块的注释掉
export PATH="/home/acy/miniconda3/bin:$PATH"
alias lr="source ~/miniconda3/bin/activate && conda activate lerobot"
把 miniconda 的可执行文件放在 path 变量下,之后使用alias,每次在 lerobot 的文件夹下就可以activate这个环境。然后如果要退出的时候连续输入 conda deactivate
进入到项目路径(比如 cd 到指定路径),然后安装依赖 pip install -e ".[feetech]"
如果是linux发行版
conda install -y -c conda-forge ffmpeg
pip uninstall -y opencv-python
conda install -y -c conda-forge "opencv>=4.10.0"
如果有遇到 ssl 认证问题,可以关闭 ssl 证书认证(虽然不安全但是work)
conda install -y -c conda-forge "opencv>=4.10.0"
寻找机械臂串口
首先按照example的视频里面的做法,把usb和电源线接上。 python lerobot/scripts/find_motors_bus_port.py 跑一次找到这次是什么串口,Linux大概是是 /dev/ttyACM0
可以通过 sudo chmod 666 /dev/ttyACM0 给予权限(如果权限不够的话。
修改串口的 config file,在 robot 的configs.py 里面 lerobot/common/robot_devices/robots/configs.py
leader_arms: dict[str, MotorsBusConfig] = field(
default_factory=lambda: {
"main": FeetechMotorsBusConfig(
# port="/dev/tty.usbmodem58760431091", 这个大概是Windows的?
port = "/dev/ttyACM0",
motors={
calibrate
这个应该是复位?一开始依赖库版本不对,额外安装 conda install -c conda-forge jpeg libtiff
总是出问题咱还是从组装开始吧
总结一下软件,无论用什么方法设置好 miniconda (以及不要让他每次都自动启动),安装依赖,如果不行关闭 ssl 验证,Debian 12 可能需要额外安装 conda install -c conda-forge jpeg libtiff
注意一下如果 mime 无法播放就关闭硬件加速。
组装
这次测试了一下 follower arm 没有问题,组装一下 leader arm 在 Linux 系统里面为了不要每次 chmod 666,将当前用户加入 dialout sudo usermod -aG dialout $USER
然后连接每一个 motor,我是
python lerobot/scripts/configure_motor.py \
--port /dev/ttyACM0 \
--brand feetech \
--model sts3215 \
--baudrate 1000000 \
--ID 1
注意不用扭上 horn,直接一个个标注好(记得标号)就可以开始拼装了。不过请拿个label,程序是按照 motor 上的 ID 控制的,如果装错了只能重来
开始拼装
推荐先通读文字和视频,这两个都包含一部分重要信息。特别注意根据图片安装线的左右免得要重装
先装从臂(因为不用修改电机,有钳子的那个)再改主臂,这样不用改电机
除了使用 M2 * 5 的螺丝,注意不要把电机的螺丝拧下来装了(捂脸)
在第五步使用两个螺丝从侧面打的时候,可以选用 M2 6 然后狠狠地打进去,需要打掉一点部件才能比较好的 fit in
把 motor horn 先摁在电机上再打螺丝,注意孔洞位置。可以旋转一下arm把孔洞露出来,就能把螺丝打进去了。
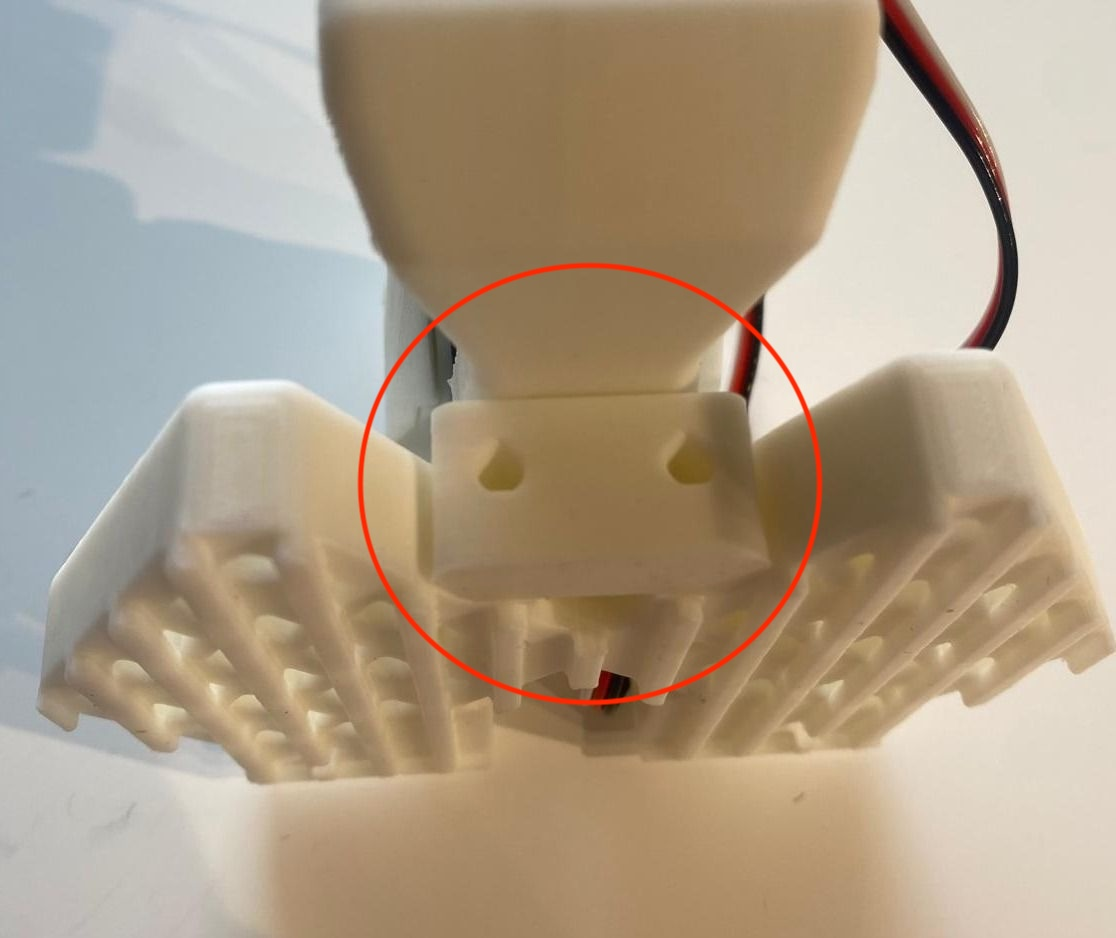
装3 号电机的时候记得先插线。
装主臂
把已经标记好的 ID 1-6 电机打开四个螺丝,拆掉一个齿轮再还原

小 tips
有304纯色螺丝钉优先使用,黑色没有这个好,如果有内六角也优先使用,不容易滑丝。不过这个机子打印孔还是适合黑色的螺丝
组装完毕测试
校准从臂
python lerobot/scripts/control_robot.py \
--robot.type=so100 \
--robot.cameras='{}' \
--control.type=calibrate \
--control.arms='["main_follower"]'
 这个应该已经失效了不推荐使用,这个file来自
这个应该已经失效了不推荐使用,这个file来自 lerobot/common/robot_devices/robots/ 可以通过call 里面的 run_arm_auto_calibration_so100 先活动一下手臂(
如果做到一半卡死了断电就可以了
校准主臂
python lerobot/scripts/control_robot.py \
--robot.type=so100 \
--robot.cameras='{}' \
--control.type=calibrate \
--control.arms='["main_leader"]'
.cache/calibration/so100 下面是校准文件,如果重新较重应该会直接覆写,或者你可以直接删除
校准需要 校准的基本思维是做出相同的动作,readme 里的三张图片不是很明显,可以通过视频解决。不过也不用很严格按照标准动作,只用保证两个机械臂是一致动作的就可以。第一张闭嘴,第二张嘴,第三张闭嘴。如果没有校准正确再来就可以。
teleoperate 的时候如果动作太猛可能会失去连接,请重启(卡住了记得断电),如果一致显示 lose connect,检查是不是有线松了或者被崩断了。